Stairway to Success:An Online Floor-Aware Zero-Shot Object-Goal Navigation Framework via LLM-Driven Coarse-to-Fine Exploration
Stairway to Success:An Online Floor-Aware Zero-Shot Object-Goal Navigation Framework via LLM-Driven Coarse-to-Fine Exploration
Testing our method in real-world environments.
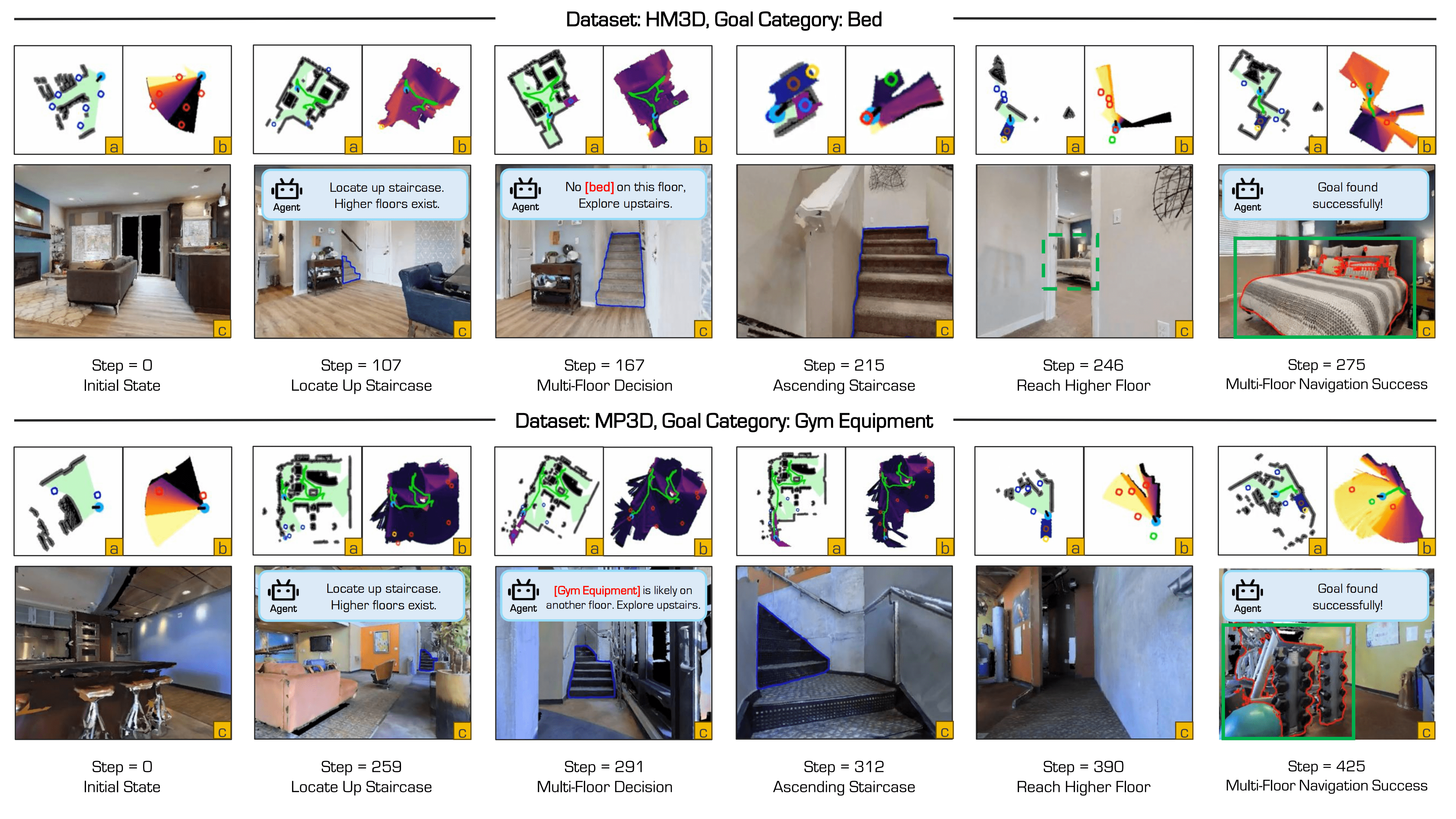
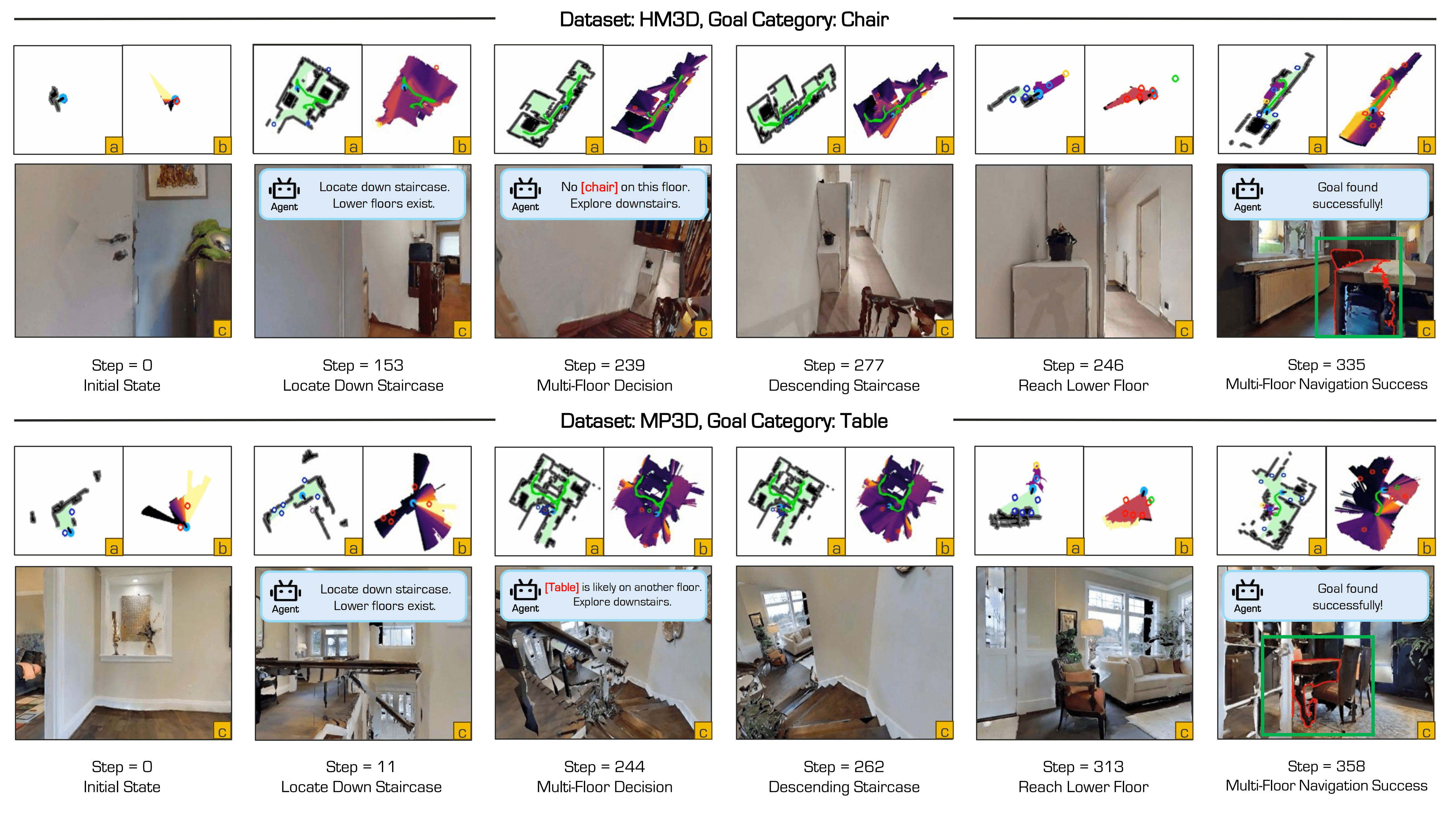
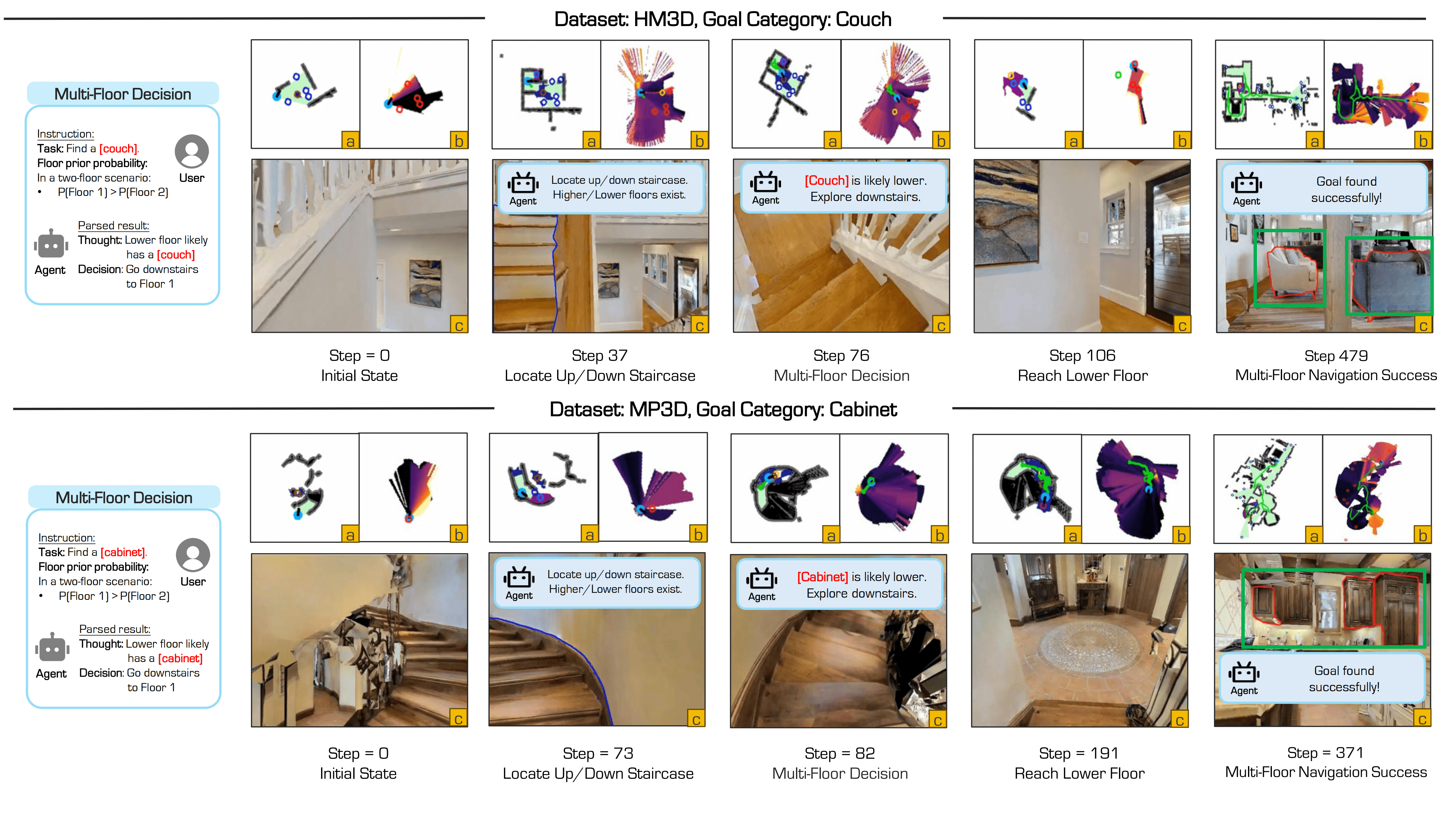
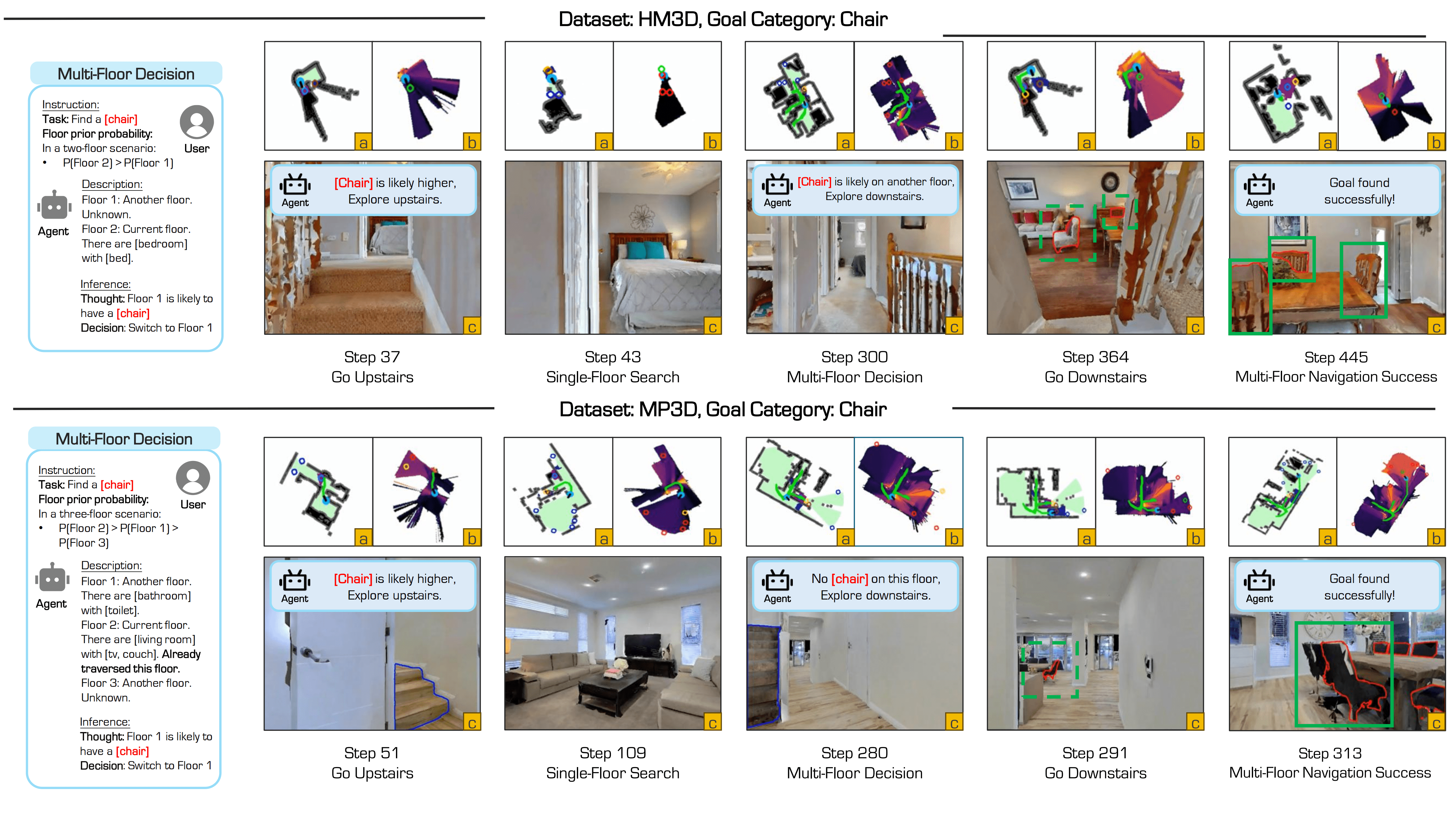
Multi-floor and single-floor navigation with open-vocabulary target objects.
Deployable service and delivery robots struggle to navigate multi-floor buildings to reach object goals, as existing systems fail due to single-floor assumptions and requirements for offline, globally consistent maps. Multi-floor environments pose unique challenges including cross-floor transitions and vertical spatial reasoning, especially navigating unknown buildings. Object-Goal Navigation benchmarks like HM3D and MP3D also capture this multi-floor reality, yet current methods lack support for online, floor-aware navigation. To bridge this gap, we propose ASCENT, an online framework for Zero-Shot Object-Goal Navigation that enables robots to operate without pre-built maps or retraining on new object categories. It introduces: (1) a Multi-Floor Abstraction module that dynamically constructs hierarchical representations with stair-aware obstacle mapping and cross-floor topology modeling, and (2) a Coarse-to-Fine Reasoning module that combines frontier ranking with LLM-driven contextual analysis for multi-floor navigation decisions. We evaluate on HM3D and MP3D benchmarks, outperforming state-of-the-art zero-shot approaches, and demonstrate real-world deployment on a quadruped robot.
Fig: Motivation of ASCENT. Unlike prior approaches that fail in multi-floor scenarios, our method enables online multi-floor navigation. By reasoning across floors, our policy succeeds in locating the goal and demonstrates a meaningful step forward in Zero-Shot Object-Goal Navigation.
Fig: Framework overview of ASCENT. The system takes RGB-D inputs (top-left), and outputs navigation actions (bottom-right). The Multi-Floor Abstraction module (top) builds intra-floor BEV maps and models inter-floor connectivity. The Coarse-to-Fine Reasoning module (bottom) uses the LLM for contextual reasoning across floors. Therefore, ASCENT achieves floor-aware, Zero-Shot Object-Goal Navigation.
HM3D and MP3D datasets. Metrics: SR (Success Rate) / SPL (Success weighted by Path Length).
| Setting | Method | Venue | Vision | Language | HM3D SR |
HM3D SPL |
MP3D SR |
MP3D SPL |
|---|---|---|---|---|---|---|---|---|
| Setting: Learning-Based | ||||||||
| Single-Floor | SemExp | NeurIPS'20 | - | - | 37.9 | 18.8 | 36.0 | 14.4 |
| Aux | ICCV'21 | - | - | - | - | 30.3 | 10.8 | |
| PONI | CVPR'22 | - | - | - | - | 31.8 | 12.1 | |
| Habitat-Web | CVPR'22 | - | - | 41.5 | 16.0 | 35.4 | 10.2 | |
| RIM | IROS'23 | - | - | 57.8 | 27.2 | 50.3 | 17.0 | |
| Multi-Floor | PIRLNav | CVPR'23 | - | - | 64.1 | 27.1 | - | - |
| XGX | ICRA'24 | - | - | 72.9 | 35.7 | - | - | |
| Setting: Zero-Shot | ||||||||
| Single-Floor | ZSON | NeurIPS'22 | CLIP | - | 25.5 | 12.6 | 15.3 | 4.8 |
| L3MVN | IROS'23 | - |  GPT-2 GPT-2 | 50.4 | 23.1 | 34.9 | 14.5 | |
| SemUtil | RSS'23 | - | BERT | 54.0 | 24.9 | - | - | |
| CoW | CVPR'23 | CLIP | - | 32.0 | 18.1 | - | - | |
| ESC | ICML'23 | - | GPT-3.5 | 39.2 | 22.3 | 28.7 | 14.2 | |
| PSL | ECCV'24 | CLIP | - | 42.4 | 19.2 | - | - | |
| VoroNav | ICML'24 | BLIP | GPT-3.5 | 42.0 | 26.0 | - | - | |
| PixNav | ICRA'24 | LLaMA-Adapter | GPT-4 | 37.9 | 20.5 | - | - | |
| Trihelper | IROS'24 |  Qwen-VLChat-Int4 Qwen-VLChat-Int4 | GPT-2 | 56.5 | 25.3 | - | - | |
| VLFM | ICRA'24 | BLIP-2 | - | 52.5 | 30.4 | 36.4 | 17.5 | |
| GAMap | NeurIPS'24 | CLIP | GPT-4V | 53.1 | 26.0 | - | - | |
| SG-Nav | NeurIPS'24 | LLaVA | GPT-4 | 54.0 | 24.9 | 40.2 | 16.0 | |
| InstructNav | CoRL'24 | - | GPT-4V | 58.0 | 20.9 | - | - | |
| UniGoal | CVPR'25 | LLaVA | LLaMA-2 | 54.0 | 24.9 | 41.0 | 16.4 | |
| Multi-Floor | MFNP | ICRA'25 | Qwen-VLChat | Qwen2-7B | 58.3 | 26.7 | 41.1 | 15.4 |
| Ours | – | BLIP-2 | Qwen2.5-7B |
65.4 | 33.5 | 44.5 | 15.5 | |
Tab: Quantitative Results on the OGN Task. This table presents quantitative comparisons of the Object-Goal Navigation task on the HM3D and MP3D datasets. It contrasts supervised and zero-shot methods across the metrics of Success Rate (SR) and Success Weighted by Path Length (SPL), highlighting the state-of-the-art performance of our approach in open-vocabulary and multi-floor navigation scenarios.